建機モデルの追加方法
既存の重機モデルを追加する方法
【サンプルモデルの例:12t油圧ショベルzx120の場合】
1-1.既存の建機モデル(GameObject)のエクスポート(Prefabの作成)
図 1-1 [拡大] |
内容 |
|---|---|

|
Hierarchy上からPrefab化したい建機モデルを選択する
例:zx120の場合
|
図 1-2 [拡大] |
内容 |
|---|---|

|
ProjectウィンドウよりAssets/Prefabフォルダを
選択しドラッグ&ドロップする
|
図 1-3 [拡大] |
内容 |
|---|---|

|
prefabファイル(zx120.prefab)がAssets/Prefabフォルダ下に作成される |
1-2.作成したprefabファイルを同一プロジェクトへインポートする
図 1-4 [拡大] |
内容 |
|---|---|

|
ProjectウィンドウのAssets/Prefabフォルダから配置したい建機の
prefabファイルを選択しScene上へドラッグ&ドロップする
|
図 1-5 [拡大] |
内容 |
|---|---|

|
Sceneビュー上で建機モデルの配置を調整し
Inspectorウィンドウ上のObject名を固有のものへ修正する
|
3Dメッシュアッセンブリデータ(.urdf)を基に重機モデルを新規作成する方法
【例:12t油圧ショベルzx120の場合】
2-1.URDF Importerパッケージの追加
図 2-1 [拡大] |
内容 |
|---|---|

|
unity editor から「Window」「Package Manager」を選択する |
図 2-2 [拡大] |
内容 |
|---|---|
|
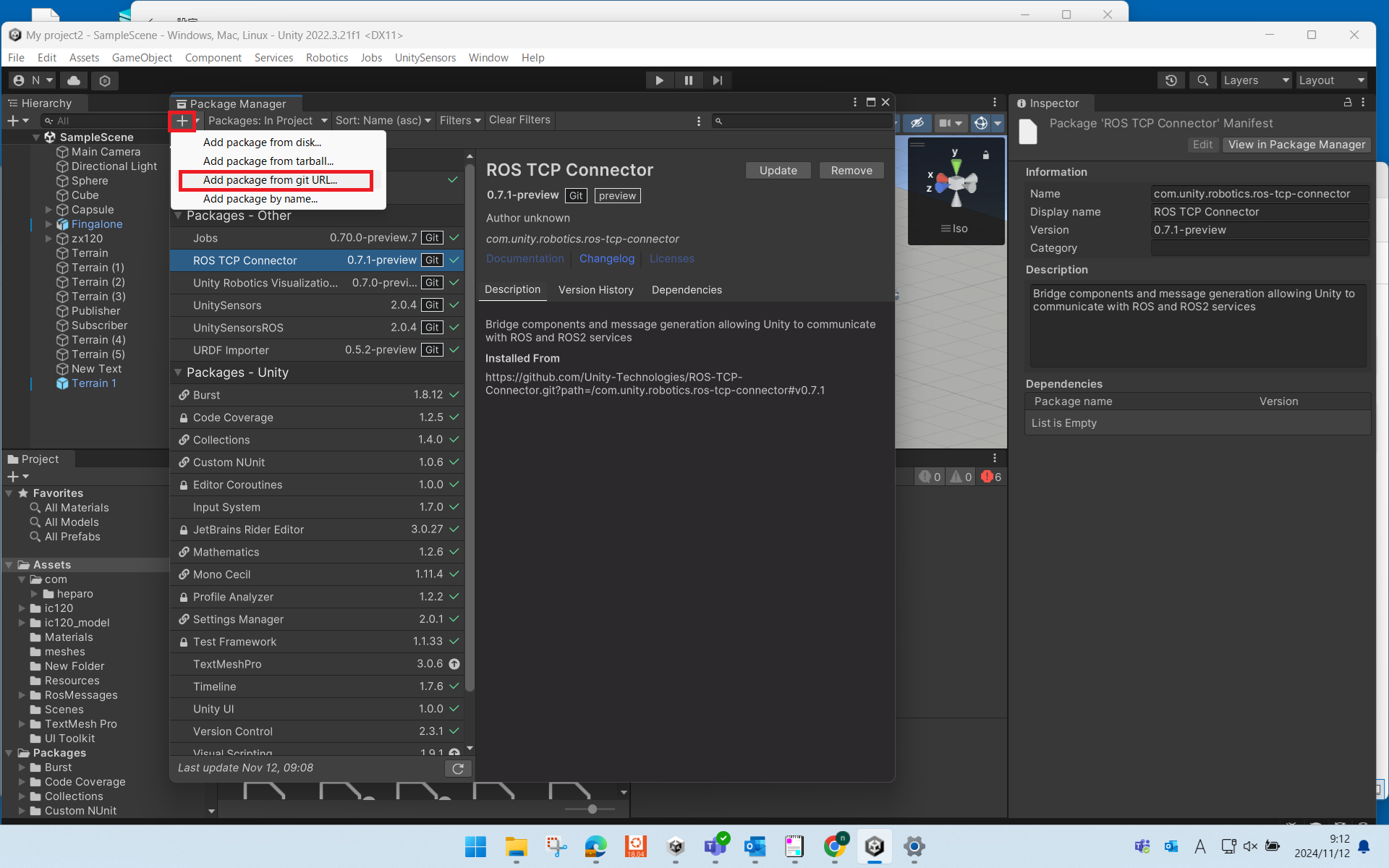
「Package Manager」ウインドウから「+」
「Add package from git URL...」を選択する
|
図 2-3 [拡大] |
内容 |
|---|---|

|
「Package Manager」ウインドウから「下記のURL」を入力し
「Add」を選択する
|
URL |
図 2-4 [拡大] |
内容 |
|---|---|

|
URDF Importerをインストール中の画面 |
図 2-5 [拡大] |
内容 |
|---|---|
|
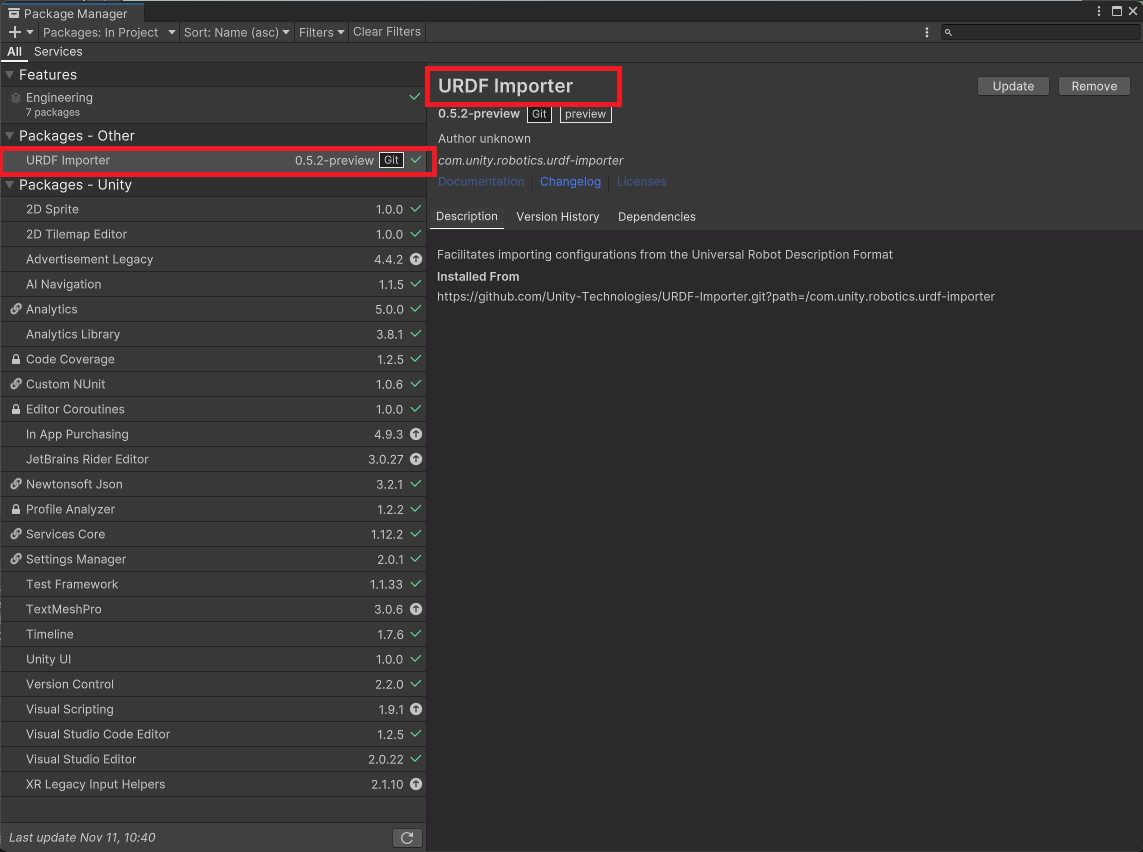
URDF Importerがパッケージリスト上にあることを確認する |
2-2.重機の3D形状アッセンブリデータ(zx120.urdf)をインポートする
図 2-6 [拡大] |
内容 |
|---|---|
|
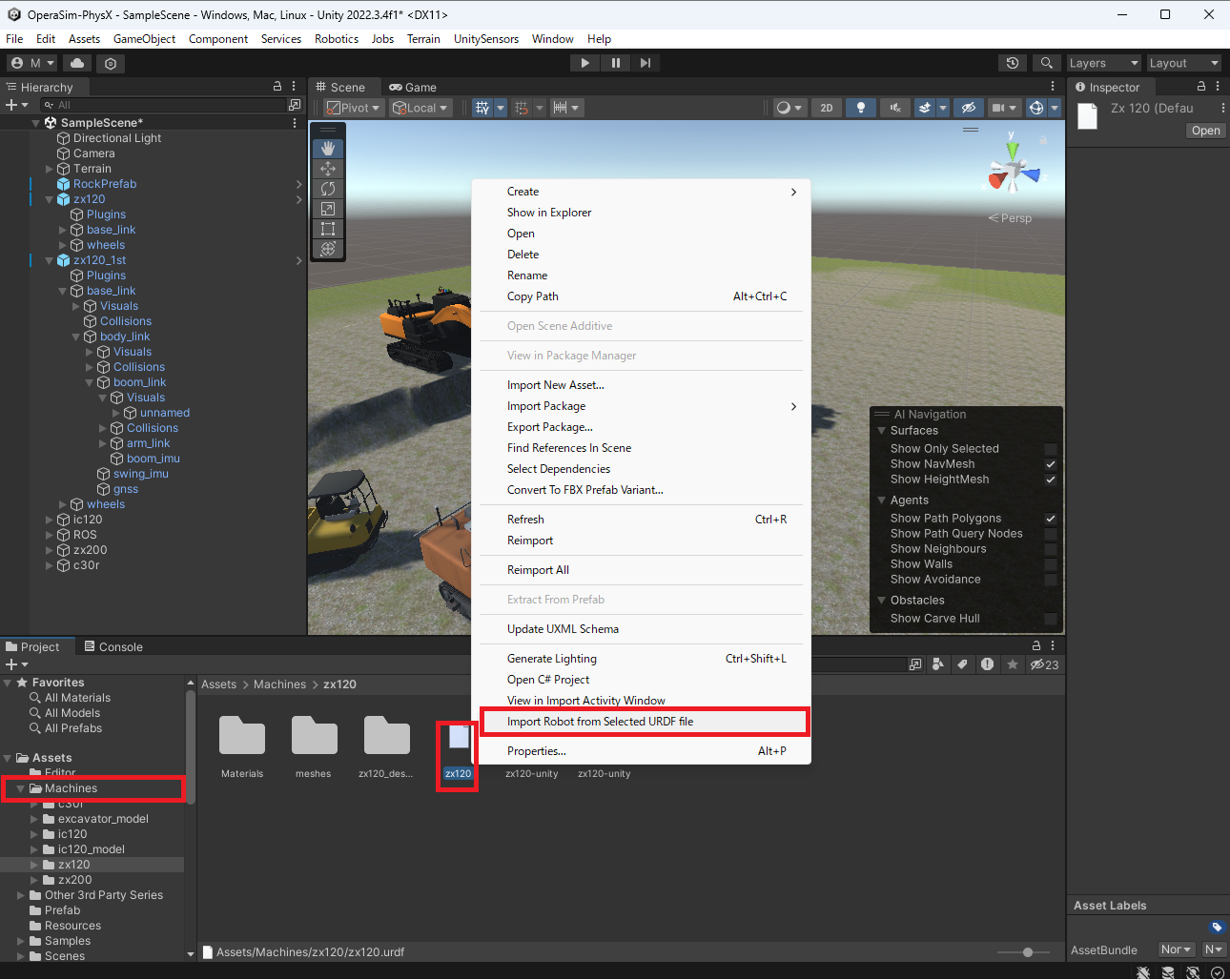
ProjectウィンドウからAssets/Machines/zx120フォルダ
にあるzx120(.urdf)を右クリックして表示されるリストから
「Import Robot from Selected URDF file」を選択する
|
図 2-7 [拡大] |
内容 |
|---|---|

|
「URDF import Setting」タブから『Y Axiss』『VHACD』を選択し
「Import URDF」を選択する
|
図 2-8 [拡大] |
内容 |
|---|---|

|
zx120の形状モデルがScene上に現れたことを確認する |
2-3.建機モデルを動作させるための諸設定
図 2-9 [拡大] |
内容 |
|---|---|

|
Hierarchyウィンドウ上でインポートしたオブジェクトのツリーを展開して表示する
(zx120 - base_link - body_link - boom_link - arm_link-bucket_link - bucket_end_link)
|
zx120のルートオブジェクトへのコンポーネント追加とパラメータセッティング
図 2-10 [拡大] |
内容 |
|---|---|
|
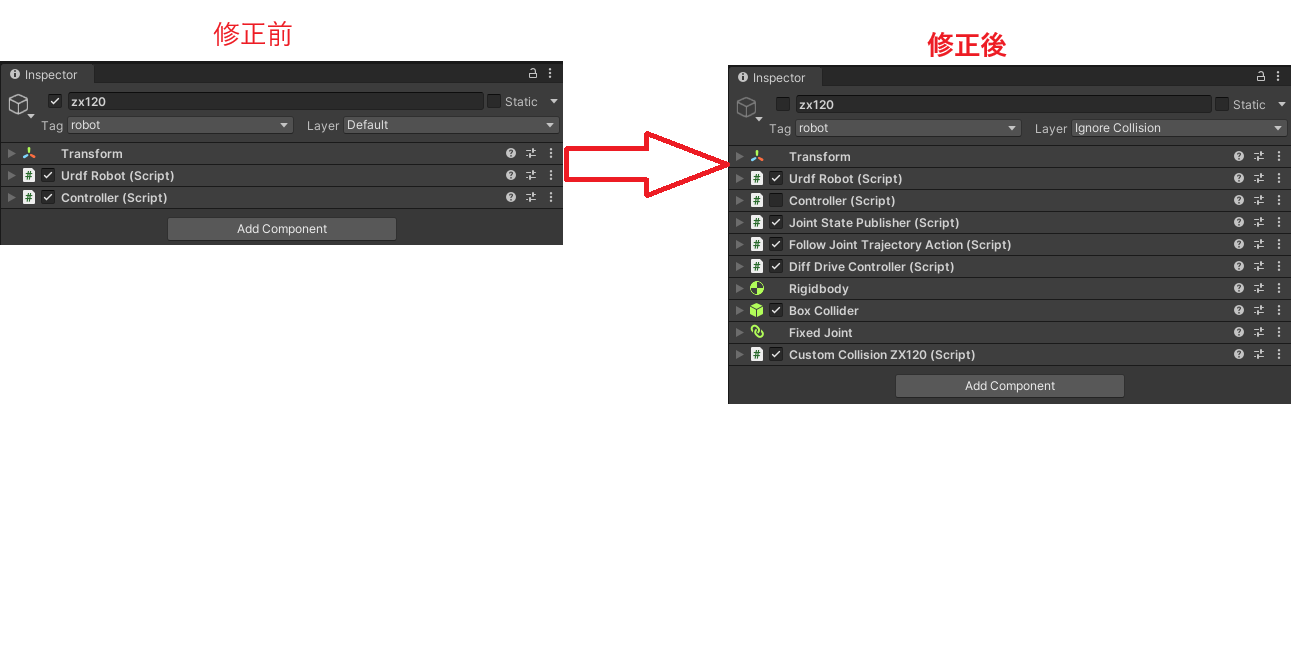
zx120のルートオブジェクト"zx120"を選択し
Inspectorウィンドウより「Add Component」
をクリックして必要なコンポーネントを追加する
またController(Script)のチェックボックスを外す
|
図 2-11 [拡大] |
内容 |
|---|---|
|
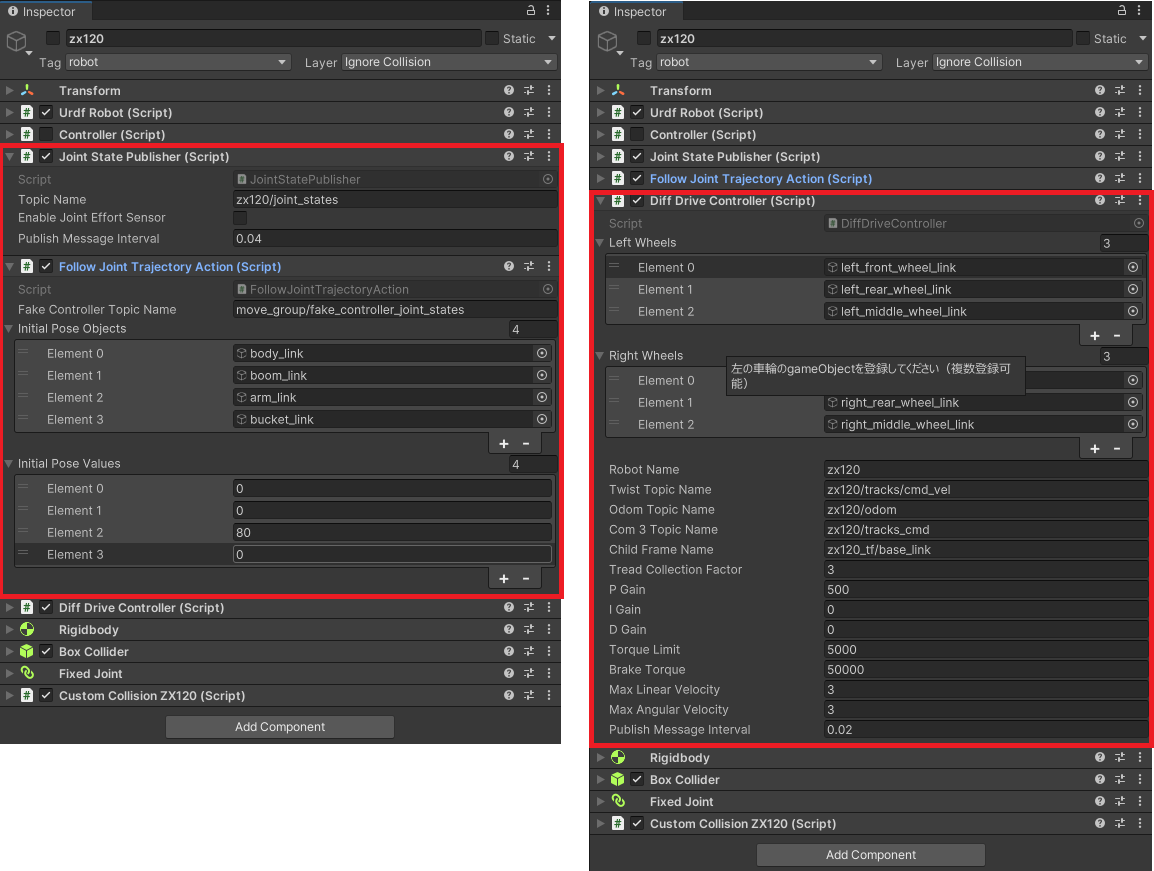
各種Componentのパラメータを設定する
Joint State Publisher, Follow Joint Trajectory(左)
Diff Drive Controller(右)
各コンポーネント, パラメータについては説明割愛
|
図 2-12 [拡大] |
内容 |
|---|---|

|
各種Componentのパラメータを設定する
Rigidbody, Box Collider(左)
Fixed Joint, Custom Collision ZX120(右)
各コンポーネント, パラメータについては説明割愛
|
zx120のbase_linkオブジェクトへのコンポーネント追加とパラメータセッティング
図 2-13 [拡大] |
内容 |
|---|---|
|
zx120の子であるbase_linkオブジェクトをHierarchyウィンドウより選択し
Inspectorウィンドウより「Add Component」
をクリックして必要なコンポーネントを追加する
またController(Script)のチェックボックスを外す
|
図 2-14 [拡大] |
内容 |
|---|---|

|
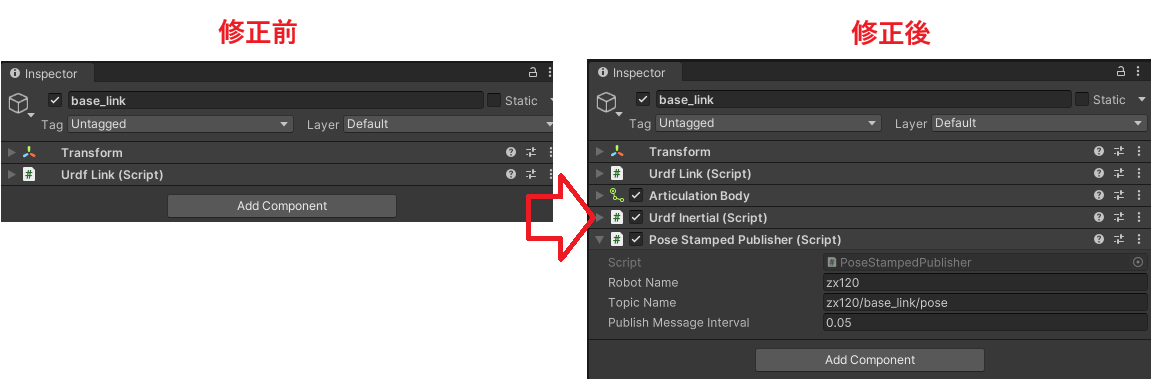
base_linkにアタッチした各種Componentのパラメータを設定する
ArticulationBody, Urdf Inertial
Pose Stamped Publisher
各コンポーネント, パラメータについては説明割愛
|
zx120のbody_linkオブジェクトへのコンポーネント追加とパラメータセッティング
図 2-15 [拡大] |
内容 |
|---|---|
|
base_linkの子であるbody_linkオブジェクトをHierarchyウィンドウより選択し
Inspectorウィンドウより「Add Component」
をクリックして必要なコンポーネントを追加する
またController(Script)のチェックボックスを外す
|
図 2-16 [拡大] |
内容 |
|---|---|

|
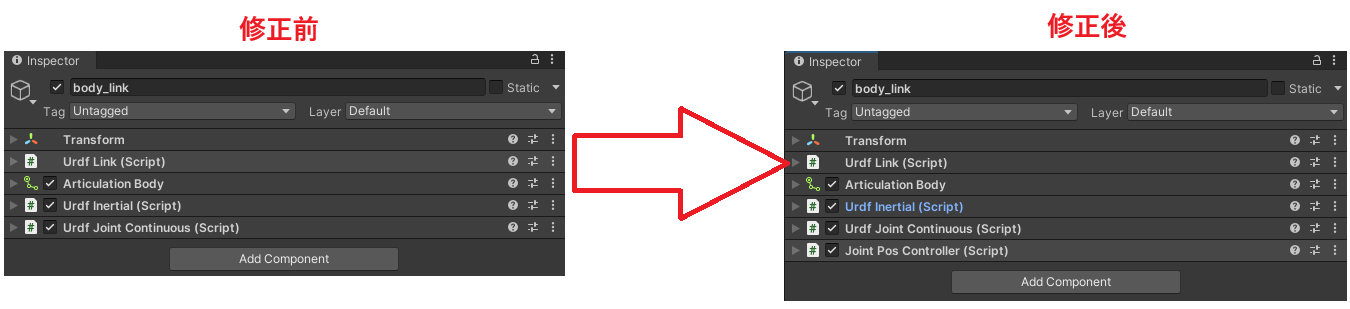
body_linkにアタッチした各種Componentのパラメータを設定する
ArticulationBody, Joint Pos Controller
各コンポーネント, パラメータについては説明割愛
|
zx120のboom_linkオブジェクトへのコンポーネント追加とパラメータセッティング
図 2-17 [拡大] |
内容 |
|---|---|
|
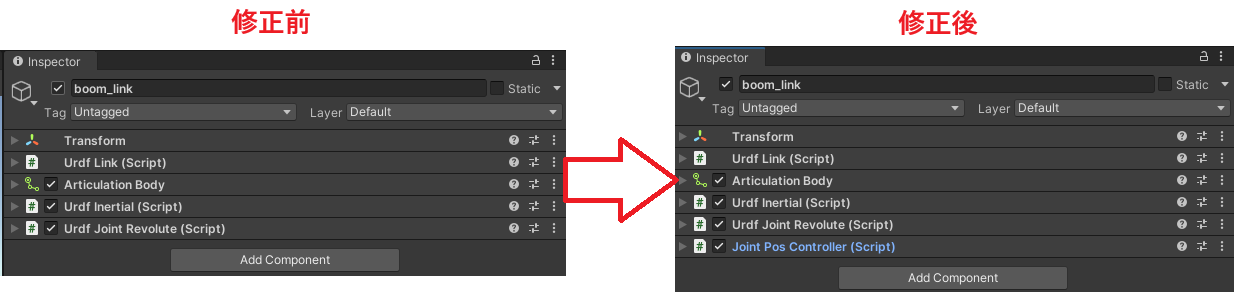
body_linkの子であるboom_linkオブジェクトをHierarchyウィンドウより選択し
Inspectorウィンドウより「Add Component」
をクリックしてJoint Pos Controllerを追加する
|
図 2-18 [拡大] |
内容 |
|---|---|

|
boom_linkにアタッチした各種Componentのパラメータを設定する
Transform
ArticulationBody, Joint Pos Controller
各コンポーネント, パラメータについては説明割愛
|
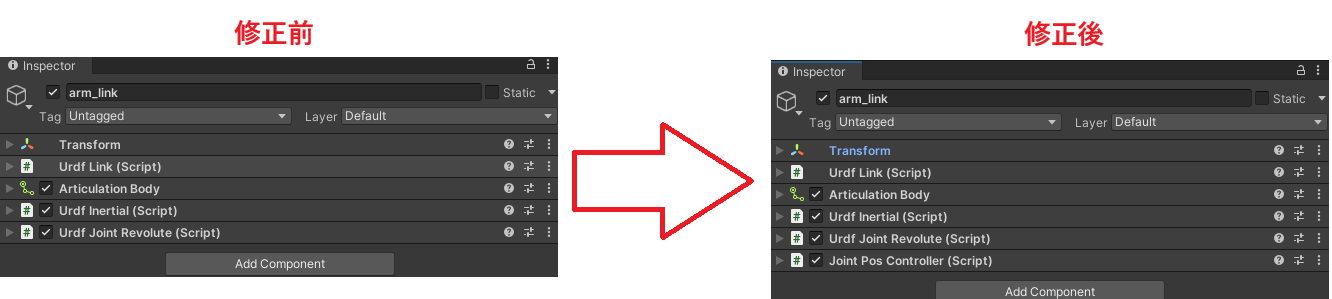
zx120のarm_linkオブジェクトへのコンポーネント追加とパラメータセッティング
図 2-19 [拡大] |
内容 |
|---|---|
|
boom_linkの子であるarm_linkオブジェクトをHierarchyウィンドウより選択し
Inspectorウィンドウより「Add Component」
をクリックしてJoint Pos Controllerを追加する
|
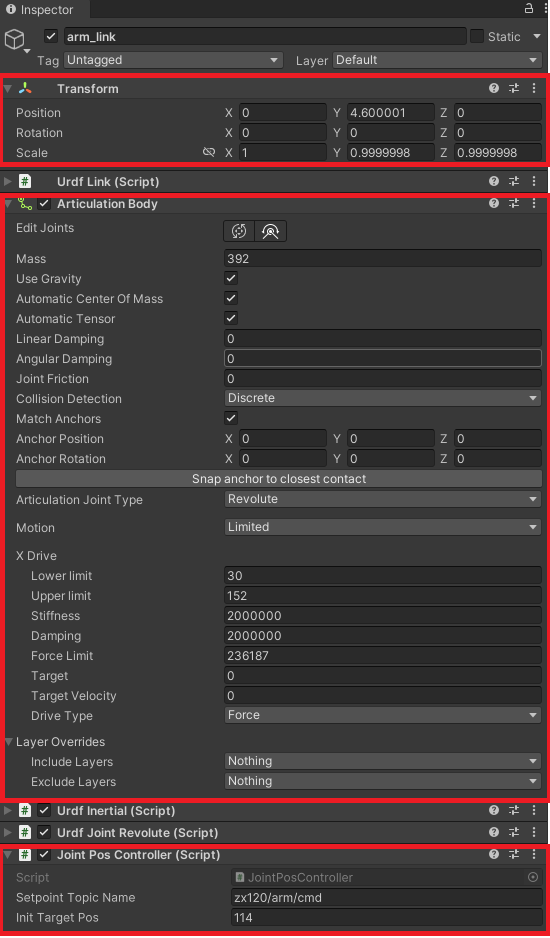
図 2-20 [拡大] |
内容 |
|---|---|
|
arm_linkにアタッチした各種Componentのパラメータを設定する
Transform
ArticulationBody, Joint Pos Controller
各コンポーネント, パラメータについては説明割愛
|
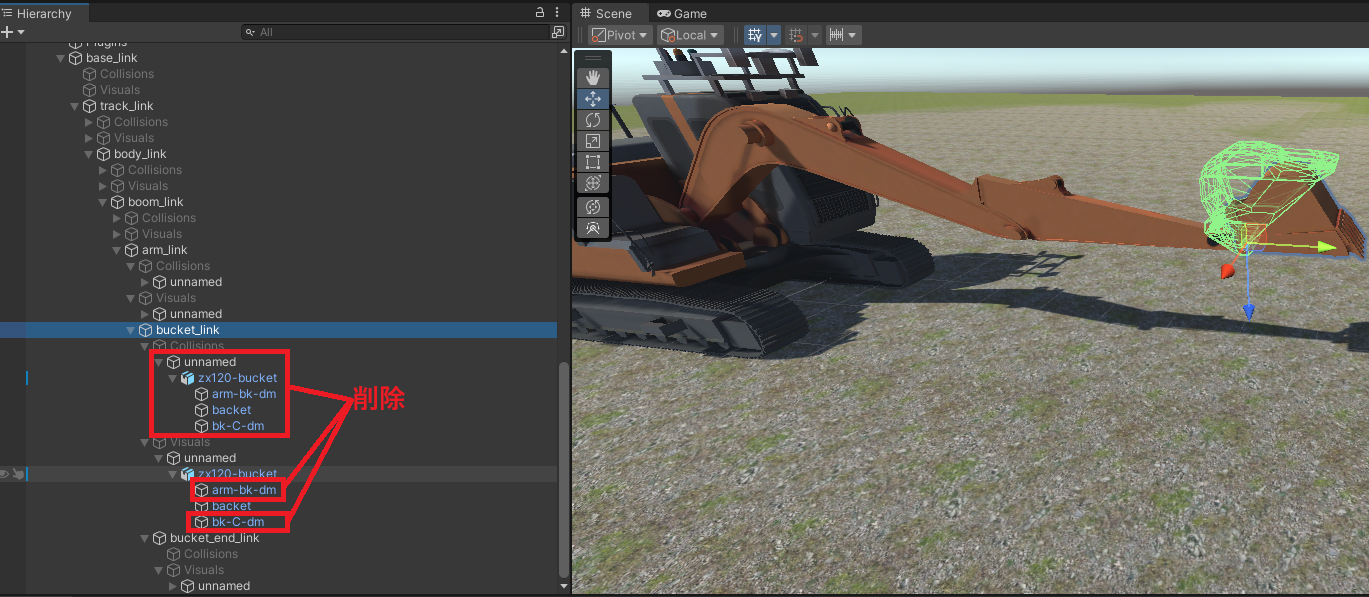
zx120のbucket_linkの不要ジオメトリの削除
図 2-21 [拡大] |
内容 |
|---|---|
|
bucket_linkの子であるCollisionsオブジェクトをHierarchyウィンドウより全て削除する
同様にVisualsオブジェクト中のarm-bk-dmおよびbk-C-dmを削除する
|
zx120のbucket_linkの粒子保持用干渉形状の生成
図 2-22 [拡大] |
内容 |
|---|---|

|
Collisionsオブジェクトに残ったbakeオブジェクトに
SA Mesh Collider Builderスクリプトをアタッチする
|
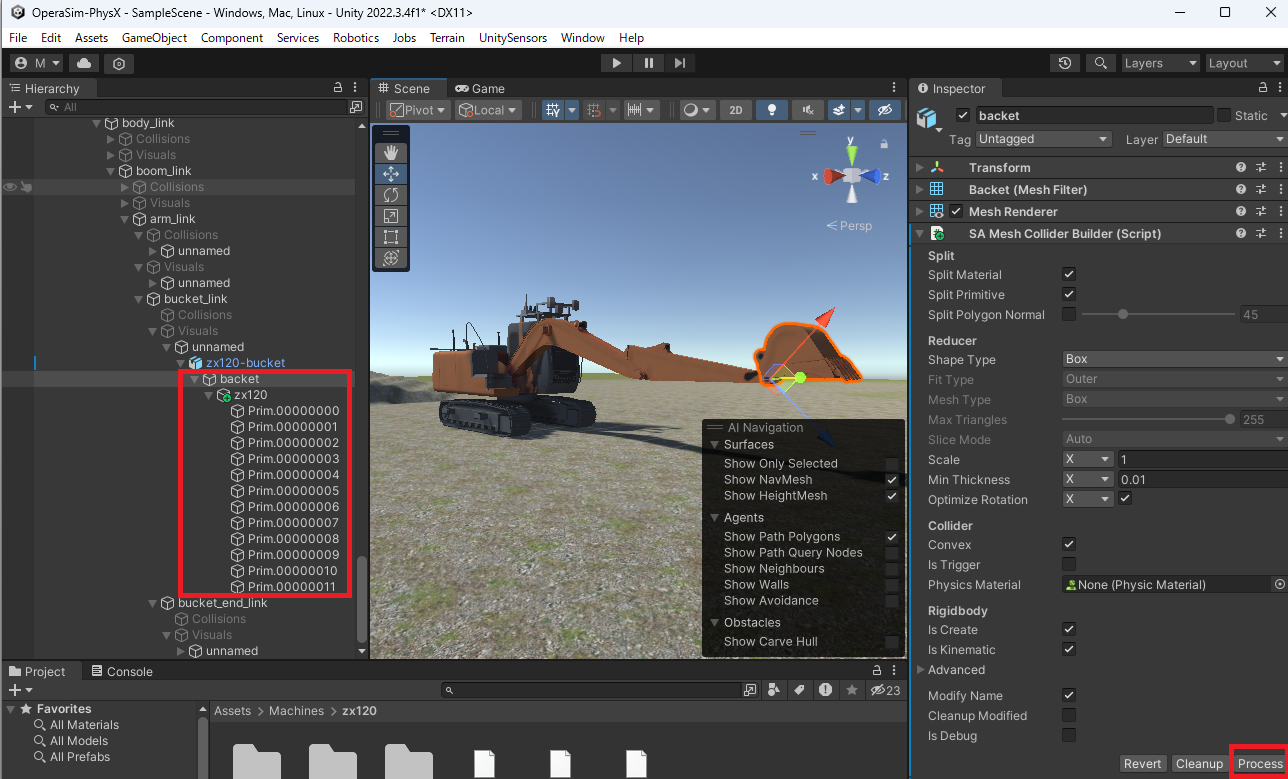
zx120のbucket_linkの粒子保持用干渉形状の生成
図 2-23 [拡大] |
内容 |
|---|---|
|
SA Mesh Collider Builder上からprocessを左クリックして
Herarchy上のbacketオブジェクト以下に「Prim.***」という
矩形オブジェクトが多数生成されることを確認する
|
zx120のbucket_linkの粒子生成用干渉形状の生成
図 2-24 [拡大] |
内容 |
|---|---|
|
|
bucket_innerについて
(松坂さん、作成方法の手順について追記お願いします)
|
2-4.移動体(クローラ)部を6輪スキッドステアとしてモデル化する方法
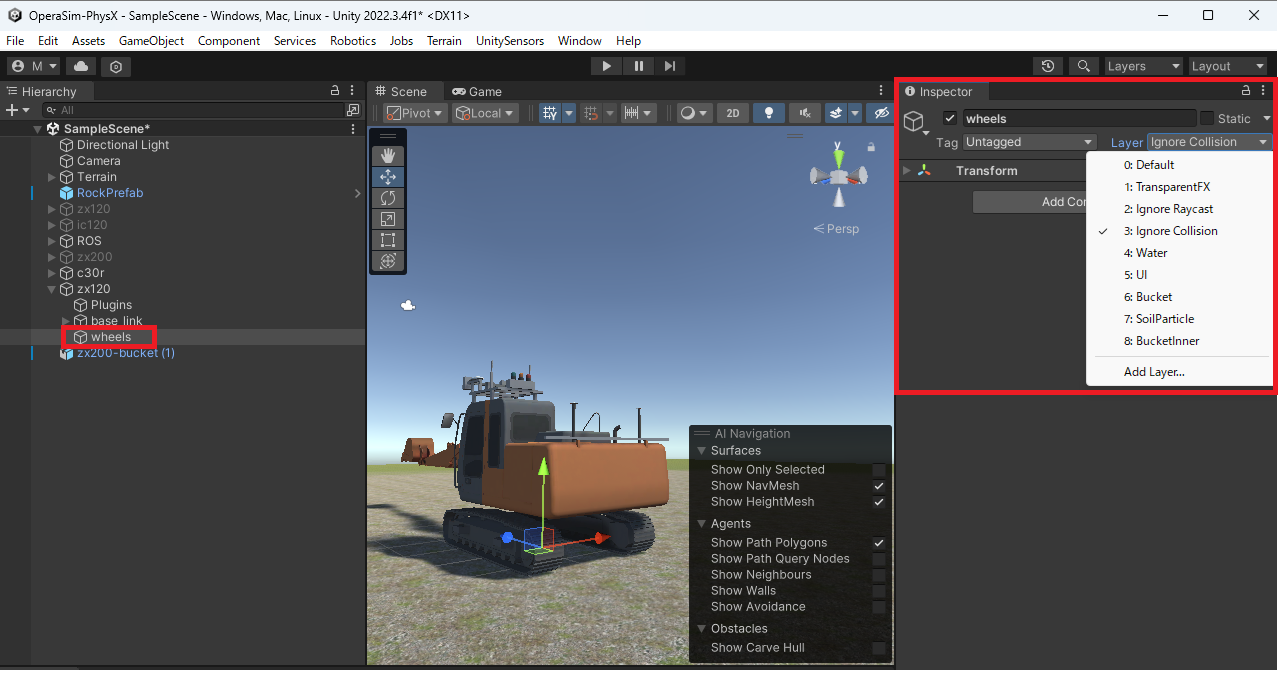
zx120のルートオブジェクトに空オブジェクトのwheelsを追加する
図 2-25 [拡大] |
内容 |
|---|---|
|
zx120のルートオブジェクトをHierarchyウィンドウより選択し
右クリックで表示されるリストから「Create Empty」を選択し
Inspector上でオブジェクト名をwheelsとする
またLayerを「Ignore Collision」に設定する
|
図 2-26 [拡大] |
内容 |
|---|---|

|
wheelsオブジェクトに対し、6つのEmptyオブジェクトを追加し
それぞれ名称を「right_rear_wheel_link」「right_middle_wheel_link」
「right_front_wheel_link」「left_rear_wheel_link」
「left_middle_wheel_link」「left_front_wheel_link」に設定する
|
図 2-27 [拡大] |
内容 |
|---|---|

|
追加した各**_wheel_linkに対しInspector上で「Add Component」より
「Wheel Collider」を追加しTransform, WheelColliderにそれぞれ
適切にパラメータを設定する
各コンポーネント, パラメータについては説明割愛
|
2-5.油圧ショベルのシミュレーションのため各オブジェクトにアタッチされるコンポーネントの一覧 +
Layer Depth |
Game Object Name |
Active |
Component |
0 |
zx120 |
〇 |
Transform |
〇 |
Urdf Robot |
||
Controller |
|||
〇 |
Joint State Publisher |
||
〇 |
Follow Joint Trajectory |
||
〇 |
DiffDriveController |
||
Rigidbody |
|||
〇 |
Box Collidar |
||
Fixed Joint |
|||
〇 |
Custom Collision ZX120 |
||
1 |
base_link |
〇 |
Transform |
Urdf Link |
|||
〇 |
Articulation Body |
||
〇 |
Urdf Inertial |
||
〇 |
Pose Stamped Publisher |
||
2 |
body_link |
〇 |
Transform |
Urdf Link |
|||
〇 |
Articulation body |
||
〇 |
Urdf Inertial |
||
〇 |
Urdf Joint Continuous |
||
〇 |
Joint Pos Controller |
||
3 |
boom_link |
〇 |
Transform |
Urdf Link |
|||
〇 |
Articulation body |
||
〇 |
Urdf Inertial |
||
〇 |
Urdf Joint Revolute |
||
〇 |
Joint Pos Controller |
||
4 |
arm_link |
〇 |
Transform |
Urdf link |
|||
〇 |
Articulation body |
||
〇 |
Urdf Inertial |
||
〇 |
Urdf Joint Revolute |
||
〇 |
Joint Pos Controller |
||
5 |
bucket_link |
〇 |
Transform |
Urdf link |
|||
〇 |
Articulation body |
||
〇 |
Urdf Inertial |
||
〇 |
Urdf Joint Revolute |
||
SA Mesh Collider Builder |
|||
〇 |
Joint Pos Controller |
||
1 |
wheels |
〇 |
Transform |
2 |
left_rear_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
||
2 |
left_middle_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
||
2 |
left_front_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
||
2 |
right_rear_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
||
2 |
right_middle_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
||
2 |
right_front_wheel_link |
〇 |
Urdf link |
〇 |
Wheel Collider |
クローラダンプ
油圧ショベルと同様の手順で作成する
ブルドーザ
TBD